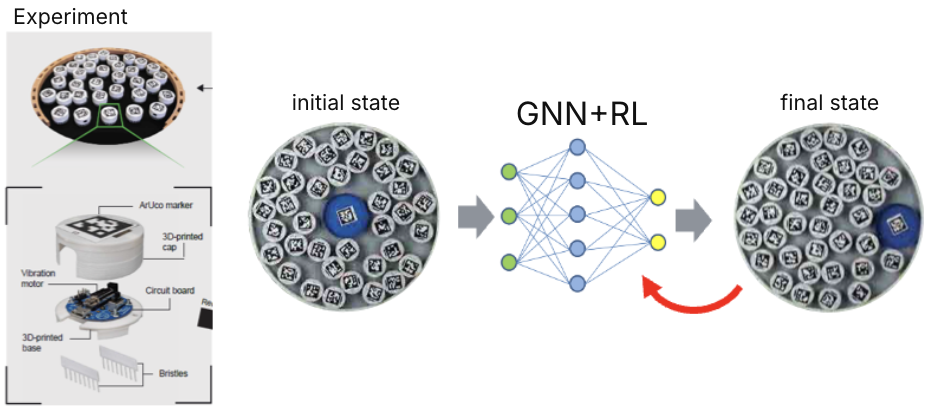
Bio-inspired Multi-Agent RL (MARL)
Active
Tasks:
Develop and train DL models to simulate large “active” clusters (>100 agents)
Design control strategies for practical applications
Reveal and analyze emergent collective dynamics in robot swarms
Explore decentralized RL for emergent coordination
Solving practical problems for:
Coordinated cargo transport
Traffic flow optimization (warehouse scenarios)
Decentralized obstacle avoidance and navigation
Participants
Ilya Makarov
Team lead
Andrei Zakharov
Project lead